
ヒューマノイドダミー|人体骨199個内蔵の高精度モデル
HBD-0800-00 ヒューマノイドダミーβフルスケルトン
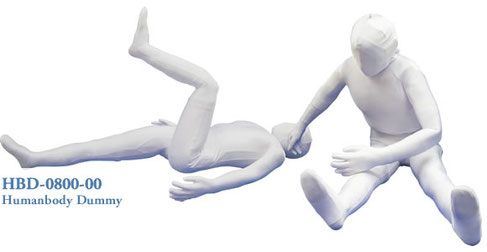
ヒューマノイドダミーβフルスケルトンとは人間のような柔軟性と人体に近似した可動域(Range Of Motion)を持ち合わせたダミー人形のことです。人体に近似した可動域は従来のダミー人形では再現することが困難だった自然な人の動きが再現できますので、歩容(歩く様子)や人の挙動の研究などに利用できます。
ヒト生体模倣型ダミー
ヒューマノイドダミー:人体構造を忠実に再現した高精度モデル
ロボット、歩容や挙動の研究など、多くの高度な研究分野での応用が可能です。
ヒューマノイドダミーは、内部に約200個の骨が組み込まれており、手首、肘、首、肩甲帯、肩、脊柱、股関節、膝、足首といった各部位の関節が人体とほぼ同じように可動します。また、体表は柔らかな特殊ウレタンで覆われ、人体のランドマークとなる点をほぼ完全に再現しています。これにより、人体構造を忠実に模倣した唯一のヒト生体模倣型ダミーとなっています。
従来のダミーでは再現が難しかった人間の自然な動きを再現できるため、ヒューマノイドダミーはヒューマノイドロボットの研究、歩容や挙動の研究など、多くの高度な研究分野での応用が可能です。



































特徴
高精度な骨格再現
ヒューマノイドダミーは、199個の骨を内蔵し、人体の骨格構造を忠実に再現しています。各骨は実際の人体の形状やサイズに基づいて設計されており、解剖学的な正確性を追求しています。
可動域の再現
顎関節を除く主要な関節の可動域を再現し、自然な動作が可能です。関節の可動範囲は、実際の人体の動作に近づけるよう設計されており、様々な動作解析やシミュレーションに対応します。
利用シーン
製品評価:
シートやベッドの評価、振動や衝撃の影響評価など、製品の安全性や快適性の検証に役立ちます。
研究開発:
配風や振動の影響を評価する実験、人体の動作解析、リハビリテーション研究など、多岐にわたる研究分野で活用できます。
動作解析:
人体の自然な動作を再現し、動作解析やリハビリテーション研究に活用できます。
安全教育:
転倒や衝突などの事故再現によるリスクアセスメントや、安全対策の教育に利用できます。
ヒューマンライクダミーとヒューマノイドダミーはどちらもヒト型ダミーに分類されますが、明確な違いがあります。ヒューマンライクダミーは、人間と同様の挙動を再現することが可能ですが、内部構造は機械的で、蝶番関節、軸関節、球体関節などのシンプルな関節構造を持っています。一方で、ヒューマノイドダミーは人体に近い複雑な構造を備えています。
ヒューマノイドダミーβフルスケルトンは平均的な人体可動部のおよそ95%をカバーしています。手首、肘、首、肩甲帯、肩、ひじ、脊柱、股関節、膝、足首といった各部の関節が人体とほぼ同様に可動します。さらに上腕の挙上時には肩甲骨が連動します。














体表は柔らかで特殊なウレタンで覆われています。人体のランドマークとなる点のほぼすべてを確認することができる唯一のヒト生体模倣型ダミーです。体表は手で押さえると実際の人間と同じように凹み、押さえていた手を離すと元の形状に戻ります。
この人体ダミーは身長約160cm、体重約55kg(実重量12㎏)の男性を想定して設計されています。
- 品番: HBD-0800-00
- 身長: 約 160 cm
- 重量: 約 12 kg
- 非可動関節部: 下顎関節・仙腸関節
- 参考価格: 2,200,000円(税別・送料別)
ヒューマノイドダミーは、人体の骨格構造と動作を忠実に再現することで、さまざまな実験・研究において信頼性の高いデータ収集を実現します。安全教育や製品評価、研究開発など、多岐にわたる分野での活用が期待されます。
ヒューマノイドダミーに内蔵された骨の一覧(計199個)
頭部の骨(計22個)
-
頭蓋骨(8個)
-
前頭骨(1)
-
頭頂骨(2)
-
側頭骨(2)
-
後頭骨(1)
-
蝶形骨(1)
-
篩骨(1)
-
-
顔面骨(14個)
-
上顎骨(2)
-
頬骨(2)
-
鼻骨(2)
-
涙骨(2)
-
下鼻甲介(2)
-
口蓋骨(2)
-
鋤骨(1)
-
下顎骨(1)
-
🧍♂️ 体幹の骨(計51個)
-
脊柱(26個)
-
頸椎(7)
-
胸椎(12)
-
腰椎(5)
-
仙骨(1)※5椎融合
-
尾骨(1)※3〜5椎融合
-
-
胸郭(25個)
-
肋骨(12対)=24個
-
胸骨(1)
-
上肢の骨(計64個)
-
肩帯(4個)
-
鎖骨(2)
-
肩甲骨(2)
-
-
上腕・前腕・手(60個)
-
上腕骨(2)
-
橈骨(2)
-
尺骨(2)
-
手根骨(16)※8個×2
-
中手骨(10)※5個×2
-
指骨(28)※14個×2
-
下肢の骨(計62個)
-
骨盤帯(2個)
-
寛骨(2)※腸骨・坐骨・恥骨の融合骨
-
-
大腿・下腿・足(60個)
-
大腿骨(2)
-
膝蓋骨(2)
-
脛骨(2)
-
腓骨(2)
-
足根骨(14)※7個×2
-
中足骨(10)※5個×2
-
趾骨(28)※14個×2
-
❌ ダミーに含まれない骨(計7個)
-
耳小骨(6個)
-
槌骨(2)
-
砧骨(2)
-
鐙骨(2)
-
-
舌骨(1個)